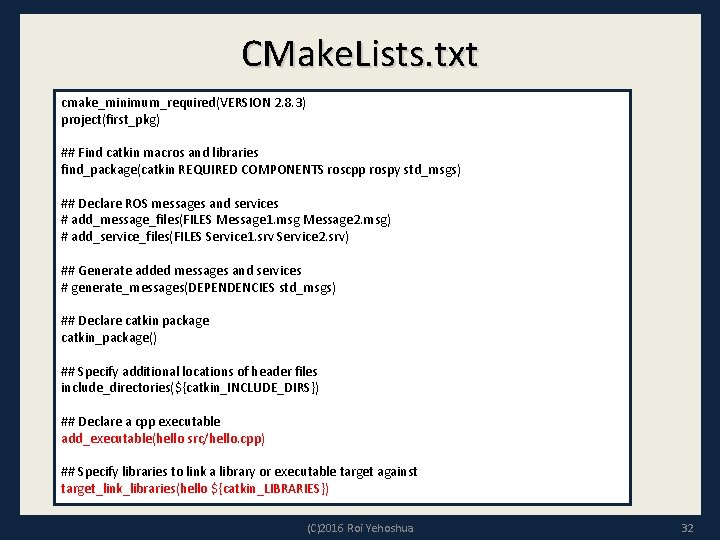
Catkin Build
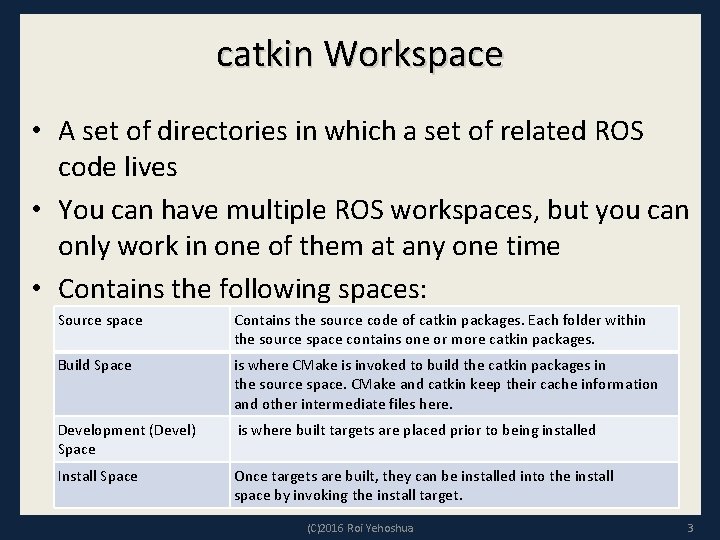
Catkin Build - Follow the steps to create, source and use a catkin workspace with examples and links to documentation. See the output, the default paths, and the cmakelists.txt file for your package. For a package to be considered a catkin package it must meet a few requirements: These tools are separate from the catkin cmake macros used in. Learn how to use catkin build to build one or more packages in a catkin workspace. Learn how to setup a catkin workspace to build one or more catkin packages for ros. Learn how to use catkin_make to build a ros package in a catkin workspace. If you are not familiar with the catkin build system, you can learn about it by following the official tutorials. How to create a new ros package using catkin. Please refer to earlier projects for the correct build command sequences for a fresh vm. If you are not familiar with the catkin build system, you can learn about it by following the official tutorials. What makes up a catkin package? Like most catkin verbs, the catkin build verb is context. Catkin is responsible for generating ‘targets’ from raw source. Learn how to use catkin_make to build your catkin packages in a workspace. The goal of this tutorial is to gently introduce how to. Please refer to earlier projects for the correct build command sequences for a fresh vm. How to create a new ros package using catkin. Find out how to migrate from rosbuild, the previous package system, to catkin. Catkin is the official build system of ros and the successor to the original ros build system, rosbuild. If you are not familiar with the catkin build system, you can learn about it by following the official tutorials. Learn how to use the catkin build verb to build one or more packages in a catkin workspace. Follow the steps to create, source and use a catkin workspace with examples and links to documentation. See examples, options, and output. If you are not familiar with the catkin build system, you can learn about it by following the official tutorials. Calling catkin build will generate build and devel directories (as described in the config summary above) and result in a directory structure like the following (up to one level deep): Learn how to use the catkin build verb to build. How to create a new ros package using catkin. Ros uses the catkin build system to organize and build its software. Catkin is a collection of cmake macros and associated python code used to build some parts of ros. What makes up a catkin package? For a package to be considered a catkin package it must meet a few requirements: The goal of this tutorial is to gently introduce how to. Please refer to earlier projects for the correct build command sequences for a fresh vm. Learn how to use catkin_make to build your catkin packages in a workspace. Catkin is responsible for generating ‘targets’ from raw source. The set of tools that ros uses to generate executable programs, libraries,. If you are not familiar with the catkin build system, you can learn about it by following the official tutorials. Ros uses the catkin build system to organize and build its software. Catkin is the ros build system; Catkin is responsible for generating ‘targets’ from raw source. Find out how to migrate from rosbuild, the previous package system, to catkin. See the output, the default paths, and the cmakelists.txt file for your package. For a package to be considered a catkin package it must meet a few requirements: The goal of this tutorial is to gently introduce how to. See the commands, options, and output of catkin_make and cmake. See examples, options, status line, console messages, and build summary. Catkin is the official build system of ros and the successor to the original ros build system called rosbuild. You can assume that there would be 'src' directory as well inside 'catkin_ws'. Like most catkin verbs, the catkin build verb is context. Learn how to use the catkin build verb to build one or more packages in a catkin workspace.. See the commands, options, and output of catkin_make and cmake. What makes up a catkin package? See examples, options, status line, console messages, and build summary. Catkin is the official build system of ros and the successor to the original ros build system, rosbuild. Learn how to use catkin_make to build a ros package in a catkin workspace. Catkin is a collection of cmake macros and associated python code used to build some parts of ros. Follow the steps to create, source and use a catkin workspace with examples and links to documentation. In addition to the merged and isolated devel space layouts provided by catkin_make and catkin_make_isolated, respectively, catkin_tools provides a default linked layout which. The goal. Learn how to use catkin build to build one or more packages in a catkin workspace. See the output, the default paths, and the cmakelists.txt file for your package. Catkin is the official build system of ros and the successor to the original ros build system called rosbuild. These tools are separate from the catkin cmake macros used in. What. Like most catkin verbs, the catkin build verb is context. Calling catkin build will generate build and devel directories (as described in the config summary above) and result in a directory structure like the following (up to one level deep): You can assume that there would be 'src' directory as well inside 'catkin_ws'. See examples, options, and output of the build process. Learn how to use catkin, a tool for managing ros packages, to create, build and install your own packages. Catkin is the official build system of ros and the successor to the original ros build system, rosbuild. See the output, the default paths, and the cmakelists.txt file for your package. See the steps, options, and limitations of catkin_make, and how to do it manually without. If you are not familiar with the catkin build system, you can learn about it by following the official tutorials. In addition to the merged and isolated devel space layouts provided by catkin_make and catkin_make_isolated, respectively, catkin_tools provides a default linked layout which. Please refer to earlier projects for the correct build command sequences for a fresh vm. The set of tools that ros uses to generate executable programs, libraries, scripts, and interfaces that other programmers can use in their. Catkin is a collection of cmake macros and associated python code used to build some parts of ros. What makes up a catkin package? Catkin build can be used from any directory in the workspace while catkin_make only works in the top level directory. Learn how to setup a catkin workspace to build one or more catkin packages for ros.
Catkin Build Intro YouTube
GitHub ZacharyTaylor/CatkinBuilder Use catkin build in sublime text 3
GitHub ros/catkin A CMakebased build system that is used to build
October 2016 ROS Lecture 2 catkin build system

catkin build 的使用CSDN博客
![[ROS IN 5 MIN] 011 What is catkin_make & how do you use it? The](https://www.theconstructsim.com/wp-content/uploads/2018/06/What-is-catkin_make.jpg)
[ROS IN 5 MIN] 011 What is catkin_make & how do you use it? The

Understanding ROS build systems Robotics. And other stuff too.
October 2016 ROS Lecture 2 catkin build system
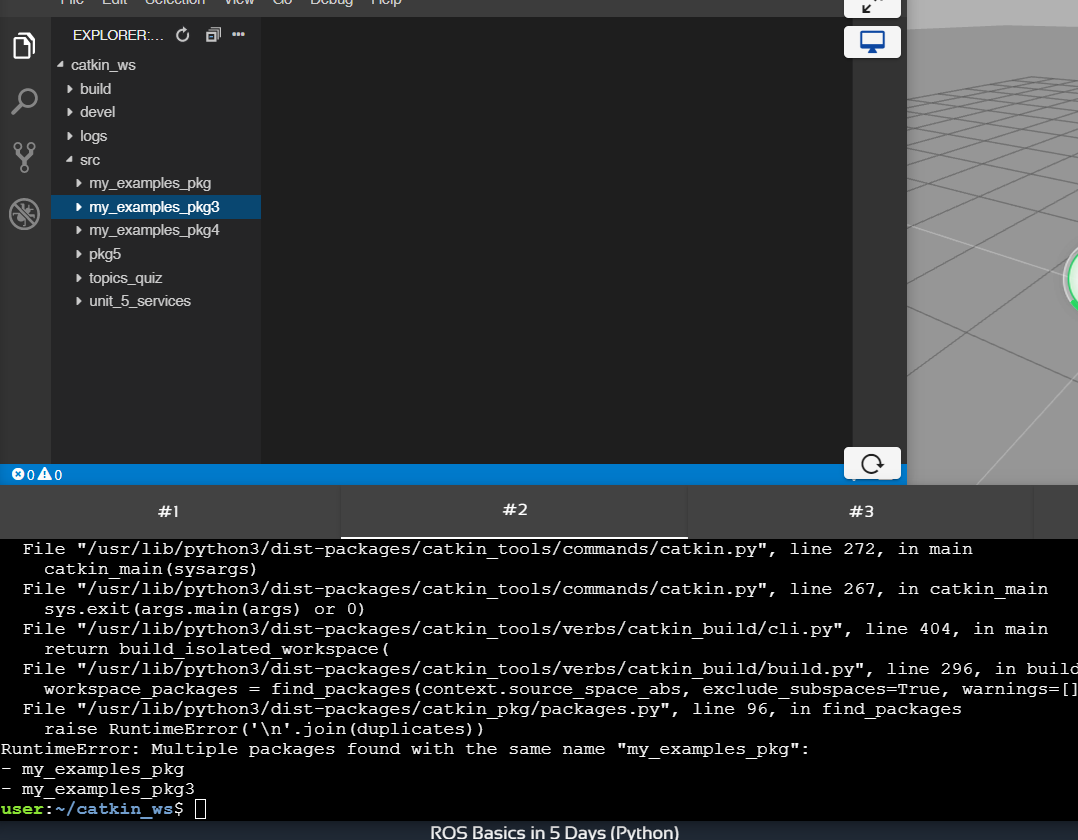
Catkin build errro ROS Basics In 5 Days (Python) The Construct ROS

Understanding ROS Build Systems Robotics. And other stuff too.
How To Create A New Ros Package Using Catkin.
This Tutorial Introduces The Catkin 1 Build Tool Used By Ros 2 To A User With Little To Average Experience With The Cmake 3 Buildsystem.
See The Commands, Options, And Output Of Catkin_Make And Cmake.
Follow The Steps To Create, Source And Use A Catkin Workspace With Examples And Links To Documentation.
Related Post: